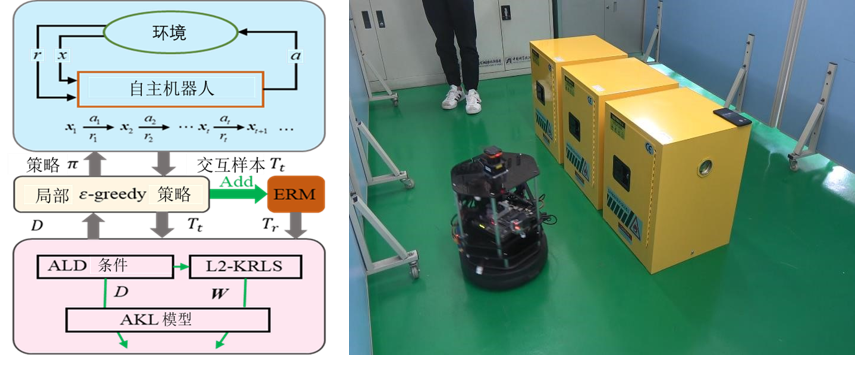
行为智能学习方法原理(左图)、在移动机器人上的实验(右图)
中国科学院沈阳自动化研究所研究人员近期提出了一种可提升机器人行为智能的新方法,相关成果发表在IEEE Transactions on Cognitive and Developmental Systems。
人类在日常生活中处理复杂任务时表现出惊人的适应性,这种适应性是个体学习能力的直接体现,使人类可以自主、增量地提升自身的行为能力。研究人员以 Q 学习与自适应核线性(Adaptive Kernel Linear,AKL)模型等网络化模型为基础,构建了机器人增量式学习方法的新框架,赋予机器人根据数据与案例的实时获取自发产生新的行为模式,以提升机器人的行为智能能力。新的算法可通过自主、示教等不同方式,使机器人对自我行为进行评估,并实时改变自身行为产生的网络结构和参数,实现行为知识的在线学习和增量学习。
该成果目前已应用在机器人自主导航中,并且通过大量的仿真和试验使机器人可以以一个空网络为起点,增量式学习并形成新的行为以适应新的场景,同时不会遗忘之前所学习的行为。
该研究得到了国家自然科学基金和机器人学重点实验室的支持。(机器人学研究室)